Dissertation aim
This dissertation was done in support of a project the university was doing
converting a mini to an EV. The project involved writing software and creating a
protocol for CAN bus to create a car auto wiper system and make a foundation for
other electronic systems in a car. The scope of the project was to create a test
bed simulating inputs from a simulated weather sensor and user interface to a
controller to the wiper motor controller’s outputs.
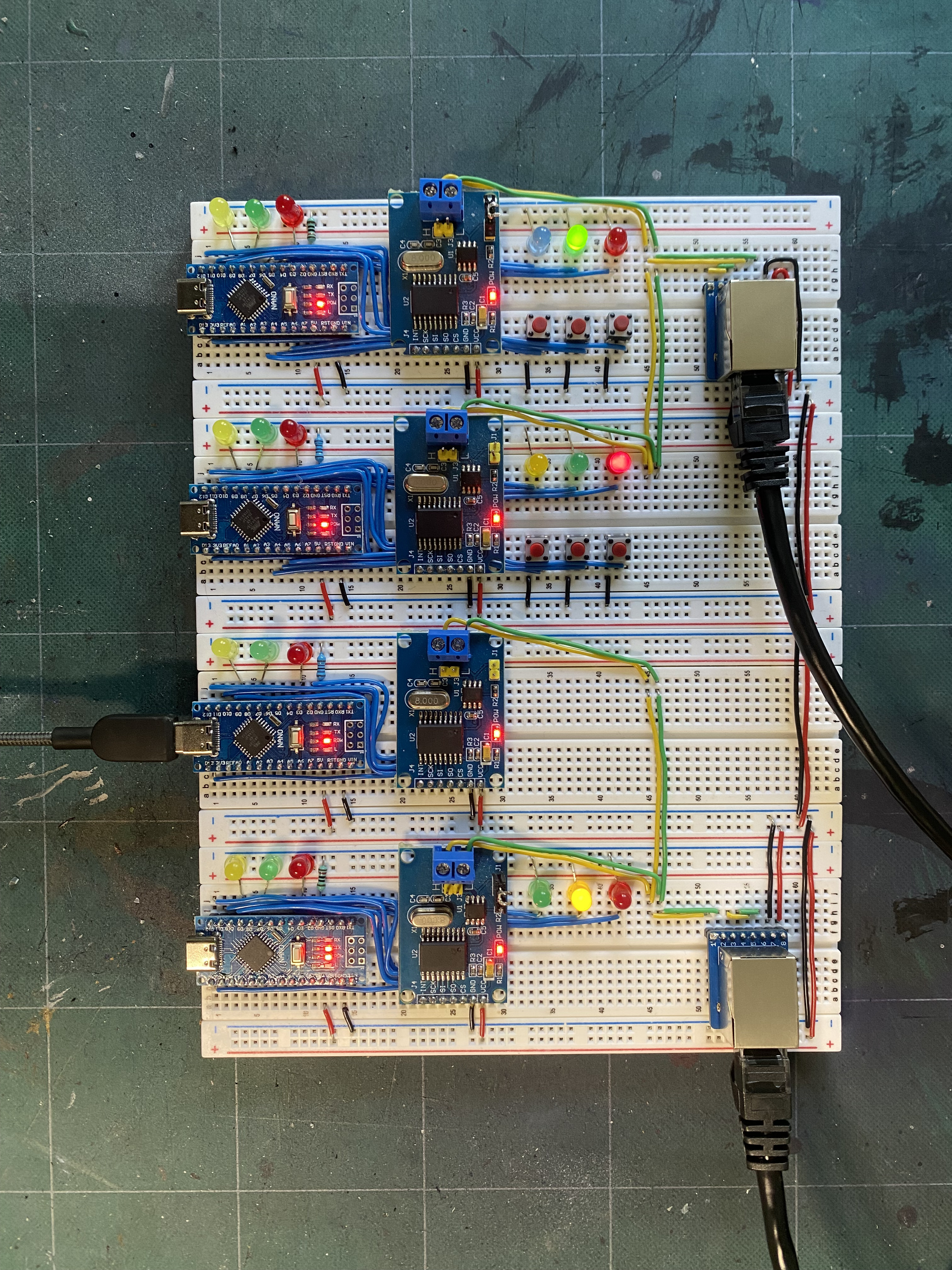
The image shows the testbed board where each microcontroller represents a node in
the CAN control system of the car. The buttons simulate inputs and the LEDs show
outputs.
Testing
A big part of this project was testing and validation. The image on the left
shows the test bord hooked up to 150m of ethernet cable to simulate the long
cable runs that you would expect in the body of a car. Another part of the
project was the software testing where all input combinations were tested to
validate that they produced the expected output.
The findings of my project are presented here:
CAN BUS FOR VEHICLE APPLICATIONS
